 Share
Share 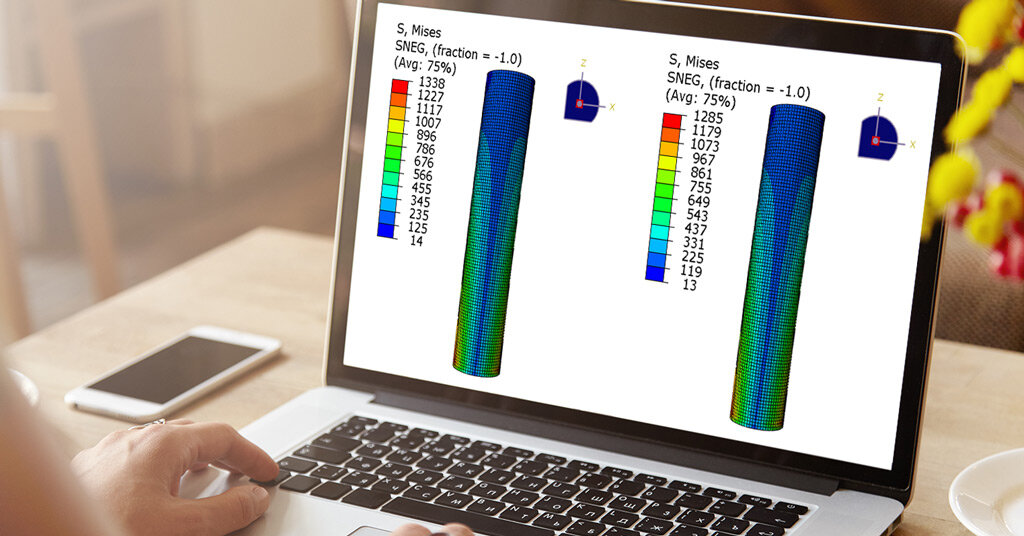
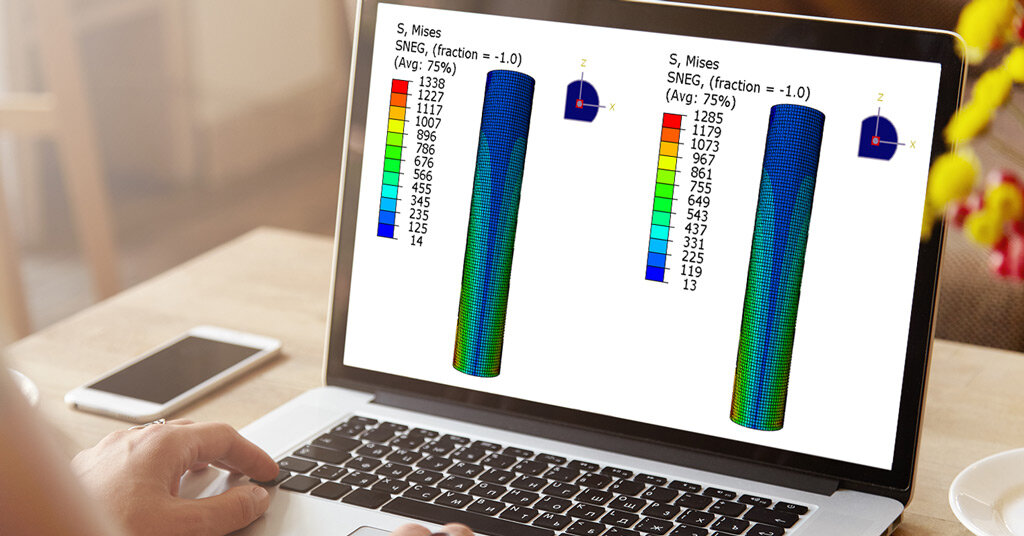
The Finite Element Method (FEM) is used to solve numerical problems in many disciplines in the field of engineering.
This method is used to solve problems to analyze structural integrity, fluid flow, heat transfer, mass transfer, stress, and strain effects, elasticity, etc. due to real-world forces like speed, velocity, temperature, and their effects on a system or its components.
The problems to be solved using Finite Element Analysis (FEA) are in the form of partial differential equations (PDEs) which are simplified into smaller equations called “finite elements” that are easier and faster to solve.
FEM can be used to simulate real-world forces and study their effects on objects without having to actually build physical prototypes of the objects. Design and manufacture teams can use FEM to study weak and tension spots and make modifications to the objects.
These finite elements can be solved using implicit or explicit algorithms, based on the variables and attributes of the problem.
Understanding what explicit and implicit FEM are can help determine the right algorithms to use to solve the problems by saving costs, time, and resources.
Explicit and implicit FEA has distinctive features and advantages over the other in terms of the following factors:
Computational Cost
Time Increment size
Dynamic or Stable Equilibrium
Type of Equation
Depending on these factors and the capabilities of explicit and implicit FEA, engineers and designers can choose the best-suited algorithm for their FEM.
For an explicit algorithm, the computational cost is less as the increment is small and all the data required for running the algorithm is available. The calculation for an explicit increment is fast and simple.
For an implicit algorithm, the computational cost is high as it takes up more memory and time. This is because a system of non-linear equations is solved in a simple implicit incrementation and it has to be solved multiple times. The computational cost increases as the number of equations to be solved increases.
In an explicit algorithm, the time increment cannot be too large as this will yield an unstable analysis and exponentially increase error. Explicit simulations are basically extrapolations that calculate the state of the system at a specified time from the current time, using the data that is already available. When time is greater and there is not enough data, it leads to errors in calculation.
The highest time increment is automatically calculated by the Abaqus and that value is called the stable time increment. This value depends on the element size, density, and rigidity of the system. The smallest element in the system usually determines the time increment of the entire system and is stable throughout the system.
In an implicit algorithm, a large time increment can be used and does not cause instability or errors in the method. Like explicit, Abaqus determines the time increment size but the value depends on how the Newton-Raphson Scheme meets each other.
This value can vary throughout the analysis as multiple non-linear equations are solved.
The implicit algorithm is used in the case of static equilibrium in a system where the sum of all forces is zero. The forces acting on the body contribute to either zero to negligible acceleration or changes on the body amounting to zero. Almost all engineering problems are confined to static equilibrium.
In an explicit algorithm, dynamic equilibrium is calculated where there is a significant effect of force and mass on the acceleration of the object. The stress and strain rates are also considered for this method.
Although all problems are in the form of mathematical PDEs, for computational purposes, they are expressed in terms of matrix equations. They can either be non-linear or linear equations depending on the type of problem.
For implicit algorithms, non-linear equations are generally used and a number of steps are required to find the solution, where each step’s solution leads to the consecutive step’s solution. These solutions are stable and allow large time increment sizes. Implicit algorithms take longer time to solve non-linear equations.
As explicit algorithms are generally used to solve dynamic equilibrium problems, non-linear equations are used. But, in explicit FEM, the time incrementation must be smaller in size: the time step is less than the Courant time step) or it can cause instability in the solution.

An implicit solver can be used to solve linear problems or problems with higher time increments. An explicit solver can be used for dynamic and non-linear problems with shorter time steps.
However, there is no black and white rule to choose between the two methods.
Implicit algorithms may not always form Newton-Raphson scheme convergence and explicit algorithms can take a long time to run.
Sometimes, it helps to run an implicit algorithm first and try if convergence can be formed. Simulators and analysts also try running a problem in an implicit solver up to a step and then import the results into the explicit solver to continue solving the rest of the problem.
Using finite element analysis to solve problems is a very important process in designing and engineering products and parts in various industries like automobile, aircraft manufacturing, building and construction, architecture, data center design, etc.
Using the FEM method and efficiently choosing the right explicit or implicit algorithm to run simulations will save a lot of money and time for business owners.
Making use of validation services from consultants and simulation experts like Mechartes, experienced in FEM analysis in various fields can help solve a lot of challenges associated with the design and implementation stages of your projects.
Share  facebook
facebook